图论
图的搜索
深度优先搜索(DFS)
1 | def dfs(root): |
广度优先搜索(BFS)
1 | from collections import deque |
图的遍历
图的遍历问题是从图中某一顶点出发,系统地访问图中所有顶点,使每个顶点恰好被访问一次。
目前,图的遍历问题分为四类:
- 欧拉通路与欧拉回路问题:遍历完所有的边而不能有重复,即一笔画问题
- 中国邮递员问题:遍历完所有的边而可以有重复
- 哈密尔顿问题:遍历完所有的顶点而没有重复
- 旅行推销员问题:遍历完所有的顶点而可以重复
目前,欧拉回路问题与中国邮递员问题已有了完美的解决方法,而哈密尔顿问题与旅行推销员问题只得到了部分解决。
欧拉通路-欧拉回路
- 欧拉通路: 通过图中的每条边且只通过一次,并且经过每一顶点的通路。图连通,图中只有0个或者2个度为奇数的节点。
- 欧拉回路:通过途中每条边且只通过一次,并且经过每一个顶点的回路。图连通,图中所有节点度均为偶数。
具有欧拉回路的无向图为欧拉图。具有欧拉通路但不具有欧拉回路的无向图为半欧拉图。
方法一———回溯
用DFS 搜索思想求解欧拉回路的思路为:利用欧拉定理判断出一个图存在欧拉通路或回路后,选择一个正确的起始顶点,用DFS 算法遍历所有的边(每条边只遍历一次),遇到走不通就回退。在搜索前进方向上将遍历过的边按顺序记录下来。这组边的排列就组成了一条欧拉通路或回路。
方法二——Fleury算法
设G为一无向欧拉图,求G中一条欧拉回路的算法为:
1)任取G中一顶点\(v_0\),另\(P_0=v_0\);
2) 假设\(P_i=v_0e_1...e_iv_i\)走到\(v_i\),按下面方法从\(E(G)-\left\{
e_1,e_2,...,e_i\right\}\)中选\(e_{i+1}\)
a) \(e_{i+1}\)与\(v_i\)相关联
b) 除非无别的边可供选择,否则\(e_{i+1}\)不应该是\(G_i\)中的割边
3) 当2)不能再进行时算法停止 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36def Fleury(g,e): #g:图 e:起始顶点
e1 = e
p = []
p.append(e)
node_num=g.number_of_nodes()
for i in range(1, node_num):
if g.degree(i) % 2 != 0:
print("不为欧拉图")
return p
#判断是否是欧拉图
while 1:
t = []
for i in g.neighbors(e1):
t.append(i)
#用t接收所有邻接节点
if len(t) == 1:
g.remove_edge(e1, t[0])
g.remove_node(e1)
e1 = t[0]
p.append(e1)
#是悬挂节点直接选取,然后删去节点以及边
else:
for j in t:
g.remove_edge(e1, j)
if nx.is_connected(g):
e1 = j
p.append(e1)
break
else:
g.add_edge(e1, j)
#判断删去边后图是否连通,如果连通就直接加入路径,如不连通将删去的边接回去,继续判断下一个节点
if e1 == e and g.size()==0:
break
#找到回路并且所有边都遍历一遍过后,结束循环
return p
哈密顿问题
概念
- 哈密尔顿通路:经过图中每个结点且仅经过一次的通路。
- 哈密尔顿回路:经过图中每个结点且仅经过一次的回路。
- 哈密尔顿图:存在哈密尔顿回路的图。
- 竞赛图:每对顶点之间都有一条边相连的有向图,n 个顶点的竞赛图称为 n 阶竞赛图。
- 与欧拉回路的对比:欧拉回路是指不重复地走过所有路径的回路;哈密尔顿回路是指不重复地走过所有点并且最后回到起点的回路。
判定
- 哈密尔顿通路的判定
设一个无向图有n个顶点,u、v为图中任意不相邻的两点,deg(x)代表x的度数。若deg(u)+deg(v)\(\geqslant\)n-1成立,则图中存在哈密尔顿通路 - 哈密尔顿回路的判定:Dirac定理
deg(u)+deg(v)\(\geqslant\)n成立,则图中存在哈密尔顿回路
推论:对于n\(\geqslant\) 3的无向图,若任一点的度数deg(u)\(\geqslant\) n/2,则图中存在哈密尔顿回路 - 竞赛图
对于n \(\geqslant\) 2的竞赛图,一定存在哈密尔顿回路
AOV(Activity On Vertex)网与拓扑排序
1 | def topoSort(graph): |
AOE网与关键路径
概念
在表示一个工程时,用顶点表示事件,用弧表示活动,权值表示活动的持续时间,这样的有向图即为AOE网,其有两个性质: + 在顶点表示事件发生之后,从该顶点出发的有向弧所表示的活动才能开始。 + 在进入某个顶点的有向弧所表示的活动完成之后,该顶点表示的事件才能发生。
在 AOE 网中,只有一个入度为 0 的点表示工程的开始,即源点,也只有一个出度为 0 的点表示工程的结束,即汇点。
关键路径
关键路径是指在AOE网中从源点到汇点路径最长的路径。这里的路径长度是指路径上各个活动持续时间之和。在AOE网中,有些活动是可以并行执行的,关键路径其实就是完成工程的最短时间所经过的路径。关键路径上的活动称为关键活动。
1. 事件\(v_i\)的最早发生时间:从源点到顶点\(v_i\)的最长路径长度,称为事件\(v_i\)的最早发生时间,记作ve(i)。求解ve(i)可以从源点ve(0)=0开始,按照拓扑排序的规则递推得到:
\[ve(i)=MAX\lbrace
ve(k)+dut(<k,j>)|<k,j>\in T,1\leq i\leq n-1\rbrace\]
2. 事件\(v_i\)的最晚发生时间:在保证整个工程完成的前提下,活动最迟的开始时间,记作\(vl(i)\)。在求解\(v_i\)的最早发生时间的前提下,从汇点开始,向源点推进得到:
\[vl(i)=MIN\lbrace
vl(k)-dut(<i,k>)|<i,k>\in T,0\leq i\leq n-2\rbrace\]
3. 松弛时间:活动\(a_i\)的最晚开始时间与最早开始时间之差就是活动\(a_i\)的松弛时间。
伪代码流程
1 | 1. 对AOE网中的顶点进行拓扑排序,如果得到的拓扑序列顶点个数小于网中顶点数,则说明网中有环存在,不能求关键路径,终止算法。否则,从源点v0开始,求出各个顶点的最早发生时间ve(i)。 |
1 | node_list = ['A','B','C','D','E','F','G','H','I'] |
图的连通性
连通图与联通分量
1)连通图:无向图 G 中,若对任意两点,从顶点 Vi 到顶点 Vj 有路径,则称 Vi 和 Vj 是连通的,图 G 是一连通图
2)连通分量:无向图 G 的连通子图称为 G 的连通分量
任何连通图的连通分量只有一个,即其自身,而非连通的无向图有多个连通分量强连通图和强联通分量
1)强连通图:有向图 G 中,若对任意两点,从顶点 Vi 到顶点 Vj,都存在从 Vi 到 Vj 以及从 Vj 到 Vi 的路径,则称 G 是强连通图
2)强连通分量:有向图 G 的强连通子图称为 G 的强连通分量
强连通图只有一个强连通分量,即其自身,非强连通的有向图有多个强连通分量。 最短路径算法
Floyd算法
1 | def getPath(i, j): |
Dijkstra 算法
概述
Dijkstra 算法是单源最短路径算法,即计算起点只有一个的情况到其他点的最短路径,其无法处理存在负边权的情况。其时间复杂度是:O(E+VlogV)
1 | import networkx as nx |
Bellman-Ford 算法
概述
Bellman-Ford算法适用于计算单源最短路径,即:只能计算起点只有一个的情况。 其最大特点是可以处理存在负边权的情况,但无法处理存在负权回路的情况。 其时间复杂度为:O(V*E),其中,V 是顶点数,E 是边数。
1 | def bellman_ford(graph, source): |
差分约束系统与最短路径
何为差分约束系统
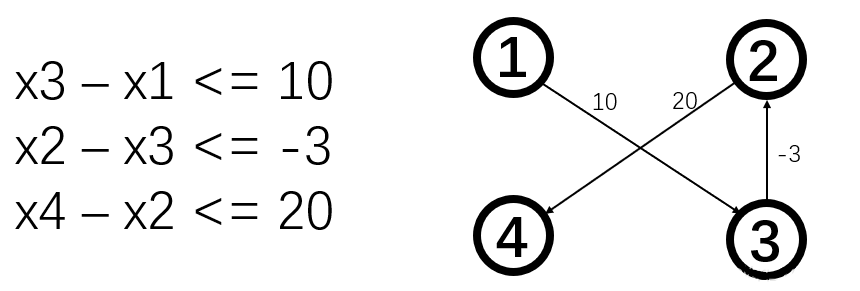
如果一个系统由n个变量和m个约束条件组成,约束条件形如 xi - xj <=
k(i,j∈[1,n]),则成为差分约束系统。
例如:
x1-x3 <= 5
x1-x2 <= 2
x2-x3 <= 1
差分约束系统的求解
以上式差分约束系统为例,若想求x1到x3的最小值,我们可以由第一个约束条件看出x1 - x3的最大值是5,但通过把第二个与第三个不等式相加,我们可以得到:x1 - x3 <= 3,最后我们验证3才是最优解。现在我们把约束条件xi - xj <= k移项,可得:xi <= xj + k,并设x1 = 0再模拟上述过程,我们发现,当且仅当xi <= xj + k时,xi的值被改变成了xj + k,学习过最短路径的hxd相信已经发现了其中的奥秘。在SPFA,dijkstra等最短路算法中,当xi <= xj + k时,我们进行两点之间的松弛操作,即更新源点到点xi的最短路径为xj + k。
差分约束系统与最短路径
差分约束系统的解法用到了单源最短路径问题中的三角形不等式。对有向图中的一条边<u,v>来说,都有dis[v]≤dis[u]+len[u][v],其中dis[u]表示源点到u结点的最短路径,v结点同理。len[u][v]表示,u与v的边的长度。三角不等式是显然的,从源点到顶点v的最短路径长度小于等于从源点到顶点 u的最短路径长度加上边 <u,v> 的长度值。
与有向图结合的例子
A*算法
伪代码流程
1 | 创建开启列表、关闭列表 |
地图对象
1 | import math |
结点对象
1 | # Manhattan Distance |
A*路径算法
1 | from Node import Node |
主函数
1 | from astar import astar |
最小生成树
概述
最小生成树的定义:最小生成树是一副连通加权无向图中一棵权值最小的生成树。
在一给定的无向图G=(V,E)中,(u,v)代表连接顶点u与顶点v的边,而w(u,,v)代表此边的权重,若存在T为E的子集且(V,T)为树,使得
\[w(T)=\sum_{(u,v)\in T}w(u,v)\]
的w(T)最小,则称此T为G的最小生成树
Prim算法
1.用两个集合A{},B{}分别表示找到的点集,和未找到的点集
2.我们以A中的点为起点a,在B中找一个点为终点b,这两个点构成的边(a,b)的权值是其余边中最小的
3.重复上述步骤#2,直至B中的点集为空,A中的点集为满
1 | import sys |
Kruskal
Kruskal 算法基本思想是并查集思想,将所有边升序排序,并认为每一个点都是孤立的,分属 n 个独立的集合。按顺序枚举每一条边,如果这条边连接的两个点分属两个不同的集合,那么就将这条边加入最小生成树,这两个不同的集合合并为一个集合;如果这条边连接的两个点属于同一集合,那么就跳过。直到选取 n-1条边为止(只剩一个集合)。
1 | # 查 |
最小瓶颈生成树
所谓瓶颈生成树,即对于图 G 中的生成树树上最大的边权值在所有生成树中最小。对于无向图来说,无向图的最小生成树一定是最小瓶颈生成树,但最小瓶颈生成树不一定是最小生成树。因此,使用 Kruskal 算法即可求出无向图的最小瓶颈生成树。
次小生成树
对于给定的无向图 G=(V,E),设 T 是图 G 的一个最小生成树,那么,对于除 T 外的第二小的生成树 T' 即为图的次小生成树。简单来说,最小生成树是生成树的最小解,次小生成树是生成树的次小解,它有可能和最小生成树的值一样,但肯定不能比最小生成树的值要小。
一般来说,求最小生成树的算法是 Prim 或 Kurskal,那么对于次小生成树,同样可以使用这两种算法来解。对于求次小生成树来说,两种算法的思路都是相同的。首先求出最小生成树,再枚举每条不在最小生成树上的边,并把这条边放到最小生成树上面,此时一定会形成环,那么在这条环路中取出一条除新加入的边外的最长路,最终得到的权值就是次小生成树的权值。
最小树形图
最小树形图,就是给出一个带权有向图,从中指定一个特殊的结点 root,求一棵以 root 为根的有向生成树 T,且使得 T 中所有边权值最小。简单来说,最小树形图就是有向图的最小生成树。
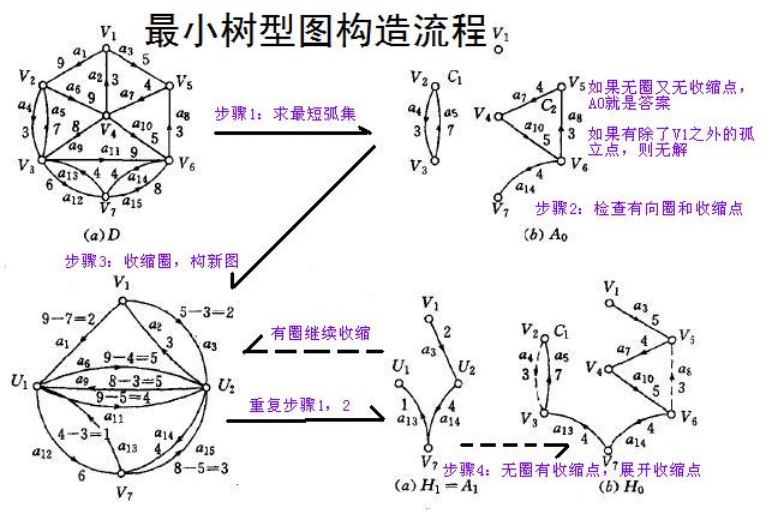
算法概述
为了求一个图的最小树形图,①先求出最短弧集合E0;②如果E0不存在,则图的最小树形图也不存在;③如果E0存在且不具有环,则E0就是最小树形图;④如果E0存在但是存在有向环,则把这个环收缩成一个点u,形成新的图G1,然后对G1继续求其的最小树形图,直到求到图Gi,如果Gi不具有最小树形图,那么此图不存在最小树形图,如果Gi存在最小树形图,那么逐层展开,就得到了原图的最小树形图。
实现细节
设根结点为v0
(1)求最短弧集合E0
从所有以vi(i ≠
0)为终点的弧中取一条最短的,若对于点i,没有入边,则不存在最小树形图,算法结束;如果能取,则得到由n个点和n-1条边组成的图G的一个子图G',这个子图的权值一定是最小的,但是不一定是一棵树。
(2)检查E0
若E0没有有向环且不包含收缩点,则计算结束,E0就是图G以v0为根的最小树形图;若E0含有有向环,则转入步骤(3);若E0没有有向环,但是存在收缩点,转到步骤(4)。
(3)收缩G中的有向环
把G中的环C收缩成点u,对于图G中两端都属于C的边就会被收缩掉,其他弧仍然保留,得到一个新的图\(G_1\),\(G_1\)中以收缩点为终点的弧的长度要变化。变化的规则是:设点v在环C中,且环中指向v的边的权值为w,点v'不在环C中,则对于G中的每一条边<v',
v>,在G1中有边<v', u>和其对应,且权值\(W_{G1}\)(<v', u>) = \(W_{G}\)(<v', v>) -
w;对于图G中以环C中的点为起点的边<v', v>,在图\(G_1\)中有边<u, v'>,则\(W_{G1}\)(<u, v'>) = \(W_{G}\)(<v',
v>)。有一点需要注意,在这里生成的图\(G_1\)可能存在重边。
对于图G和\(G_1\):
①如果图\(G_1\)中没有以v0为根的最小树形图,则图G也没有;
②如果\(G_1\)中有一v0为根的最小树形图,则可按照步骤(4)的展开方法得到图G的最小树形图。
所以,应该对于图G1代到(1)中反复求其最小树形图,直到G1的最小树形图u求出。
(4)展开收缩点
假设图G1的最小树形图为T1,那么T1中所有的弧都属于图G的最小树形图T。将G1的一个收缩点u展开成环C,从C中去掉与T1具有相同终点的弧,其他弧都属于T。
1 | class Edge: |
写到这里发现了一个写的贼好的网站,大家看这个吧 图论详细介绍